Overall Design
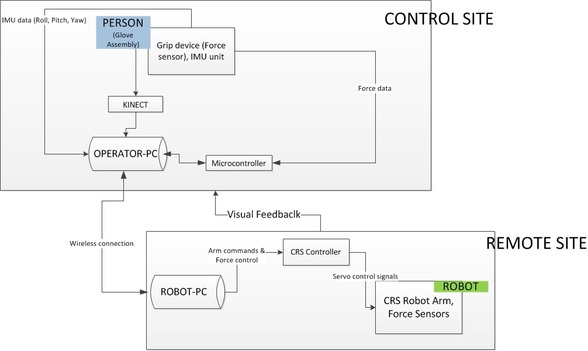
The system is divided into two sections; the first being the control site which is the location of the operator and the next is the remote site which is the location of the robot arm to be controlled.
The control site of the system consists of a Microsoft Kinect system which receives arm position information and passes that onto the PC on site (called the Operator-PC) which does the necessary processing. The Operator PC then communicates to a glove worn by the operator which houses an inertial measurement unit and force sensors. The IMU and force sensors are respectively for giving the operator effective robot control and feedback reception. The inertial measurement unit is used to gather information on the roll, pitch and yaw of the operator’s hand which along with the Cartesian coordinates from the Kinect is used to track the operator’s hand. The force sensors measure the amount of closing force on the operator so that the system can control the grip force on the robot's end effector.
The control site communicates to the remote site over a wireless network connection. The objective of the remote site is to drive the robot arm based on input from the control site and also to exert a controlled amount of force on objects in the end effector. The PC on the remote site controls the robot via a custom robot controller.
The design details and analysis of the various components in this design are covered below
The control site of the system consists of a Microsoft Kinect system which receives arm position information and passes that onto the PC on site (called the Operator-PC) which does the necessary processing. The Operator PC then communicates to a glove worn by the operator which houses an inertial measurement unit and force sensors. The IMU and force sensors are respectively for giving the operator effective robot control and feedback reception. The inertial measurement unit is used to gather information on the roll, pitch and yaw of the operator’s hand which along with the Cartesian coordinates from the Kinect is used to track the operator’s hand. The force sensors measure the amount of closing force on the operator so that the system can control the grip force on the robot's end effector.
The control site communicates to the remote site over a wireless network connection. The objective of the remote site is to drive the robot arm based on input from the control site and also to exert a controlled amount of force on objects in the end effector. The PC on the remote site controls the robot via a custom robot controller.
The design details and analysis of the various components in this design are covered below